こんにちは。
正則化パート2ですね。前回の最後に
- Ridge Regression (Tikhonov regularization)
- Lasso Regression
を例に出しました。今回はこれらを用いて正則化について学びましょう。の前に線形回帰を思い出しましょう。その時に
![\[\texttt{minimize} | y - X\beta|^2\]](https://research.miidas.jp/wp-content/ql-cache/quicklatex.com-50eb088c1174d38e9baa58f470c8cf11_l3.png "Rendered by QuickLaTeX.com")
を考えて
![\[X(X^TX)^{-1}X^T\]](https://research.miidas.jp/wp-content/ql-cache/quicklatex.com-e969d6a5c655a05e2fbc370cc17376e3_l3.png "Rendered by QuickLaTeX.com")
 の列ベクトルが張る空間への射影行列をやりましたね。ここでが正則ということなのでもう一歩踏み込みQR分解を行います。つまり
の列ベクトルが張る空間への射影行列をやりましたね。ここでが正則ということなのでもう一歩踏み込みQR分解を行います。つまり
![\[X = QR ~~ s.t. ~~ Q^TQ = I ~~ , ~~ R~ \textrm{is upper triangular matrix}\]](https://research.miidas.jp/wp-content/ql-cache/quicklatex.com-f94d438ca12fefda43a0b28a512bb986_l3.png "Rendered by QuickLaTeX.com")
を使うと
![\[(X^TX)^{-1}X^T = (R^TQ^TQR)^{-1}R^TQ^T = R^{-1}Q^T\]](https://research.miidas.jp/wp-content/ql-cache/quicklatex.com-aaf0f86f9f1491d3ab9737e2ca908de4_l3.png "Rendered by QuickLaTeX.com")
とできます。わかったことは
の列ベクトルが張る空間への射影行列 が
が となるということ。超シンプル。これが線形回帰。で、これに
となるということ。超シンプル。これが線形回帰。で、これに 正則化項を加えます。つまり
正則化項を加えます。つまり に対して
に対して
![\[\texttt{minimize} | y - X\beta|^2 + \lambda | \beta|_2^2\]](https://research.miidas.jp/wp-content/ql-cache/quicklatex.com-0c904519a931f644f504160dcc84b13f_l3.png "Rendered by QuickLaTeX.com")
を考えます。これをリッジ回帰というのでしたね。ラッソは 正則化項を使います。
正則化項を使います。
違いは?
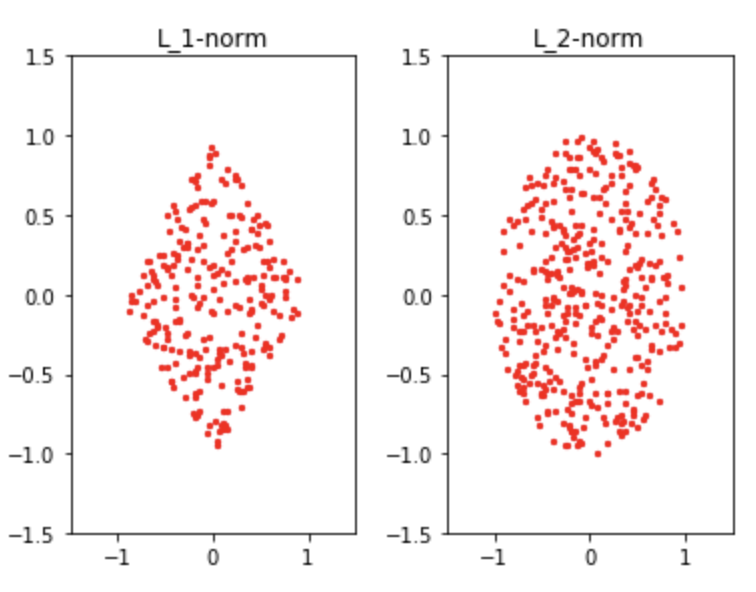
正則化項のノルムです。との違いは?もう少し親しみある言い方だと距離と絶対値の違いは?
Answer: 微分可能性
は微分できませんね。前回の図を思い出してください。は尖っていました。
勾配法は微分を使いましたね。なので一旦ラッソは無視してリッジについて学びましょう。
次の解を考えます。ただし
![\[\beta = \texttt{argmin}_b { |y-Xb |^2_2 + \lambda|b|^2_2 }\]](https://research.miidas.jp/wp-content/ql-cache/quicklatex.com-188ee680e6edf1bfa98fb17363f3a78b_l3.png "Rendered by QuickLaTeX.com")
「アーグミン 」は右辺を最小化するときのということ。これを展開し、微分すると
」は右辺を最小化するときのということ。これを展開し、微分すると
![\[|y-Xb |^2_2 + \lambda|b|^2_2 &= (y-Xb)^T(y-Xb) + \lambda b^Tb\]](https://research.miidas.jp/wp-content/ql-cache/quicklatex.com-5f48b5804f6ffb95bfe92e227ddf1b12_l3.png "Rendered by QuickLaTeX.com")
![\[= y^Ty -2y^TXb + b^TX^TXb + \lambda b^Tb\]](https://research.miidas.jp/wp-content/ql-cache/quicklatex.com-c5413427597f0d86e63100eec8a16c27_l3.png "Rendered by QuickLaTeX.com")
![\[\frac{\partial}{\partial b} \left( |y-Xb |^2_2 + \lambda|b|^2_2 \right) = -2X^Ty + 2X^TXb + 2\lambda b = 0\]](https://research.miidas.jp/wp-content/ql-cache/quicklatex.com-fa62ac6b25164d11c44c853d772cc034_l3.png "Rendered by QuickLaTeX.com")
![\[\Leftrightarrow (X^TX + \lambda I)b = X^Ty\]](https://research.miidas.jp/wp-content/ql-cache/quicklatex.com-a3cea3abb6e055308afea1256a4af62f_l3.png "Rendered by QuickLaTeX.com")
![\[\Leftrightarrow \beta = (X^TX + \lambda I)^{-1}X^Ty\]](https://research.miidas.jp/wp-content/ql-cache/quicklatex.com-208057f3a9c40f8cb014273b8ac0c8ff_l3.png "Rendered by QuickLaTeX.com")
これが欲しかった ですね。さっきのと似てませんか?邪魔なのは
ですね。さっきのと似てませんか?邪魔なのは の項。なのでここで
の項。なのでここで とするとさっきのと同じになります。だって元々のコスト関数の正則化項が0になるわけですからね。
とするとさっきのと同じになります。だって元々のコスト関数の正則化項が0になるわけですからね。
 、これ意味ある?
、これ意味ある?
ここで は半正定値対称行列であり、実数値からなる対称行列は実数の固有値を持ちます。よっての固有値は0以上。行列式を計算して見よう。
は半正定値対称行列であり、実数値からなる対称行列は実数の固有値を持ちます。よっての固有値は0以上。行列式を計算して見よう。
![\[\det |X^TX + \lambda I - t I| = 0\]](https://research.miidas.jp/wp-content/ql-cache/quicklatex.com-7c82764d23e4602165e3bbbc1b02031b_l3.png "Rendered by QuickLaTeX.com")
![\[\det |X^TX - (t - \lambda) I| = 0\]](https://research.miidas.jp/wp-content/ql-cache/quicklatex.com-63ef36545841f670ec80fa65354c8aab_l3.png "Rendered by QuickLaTeX.com")
これを について解くとの固有値が求まりますね。そこでその固有値の一つを
について解くとの固有値が求まりますね。そこでその固有値の一つを とするとリッジ回帰における固有値は
とするとリッジ回帰における固有値は となり、分シフトされていますね。つまり、行列式をゼロから遠ざけており正則をキープしてくれています。
となり、分シフトされていますね。つまり、行列式をゼロから遠ざけており正則をキープしてくれています。
逆に とすると
とすると となってしまいますね。これもまずい。
となってしまいますね。これもまずい。
をどうやって決めるか
これが問題ですね。これは交差検証で選ばれます。交差検証ってなんやあ??
K-fold cross validation
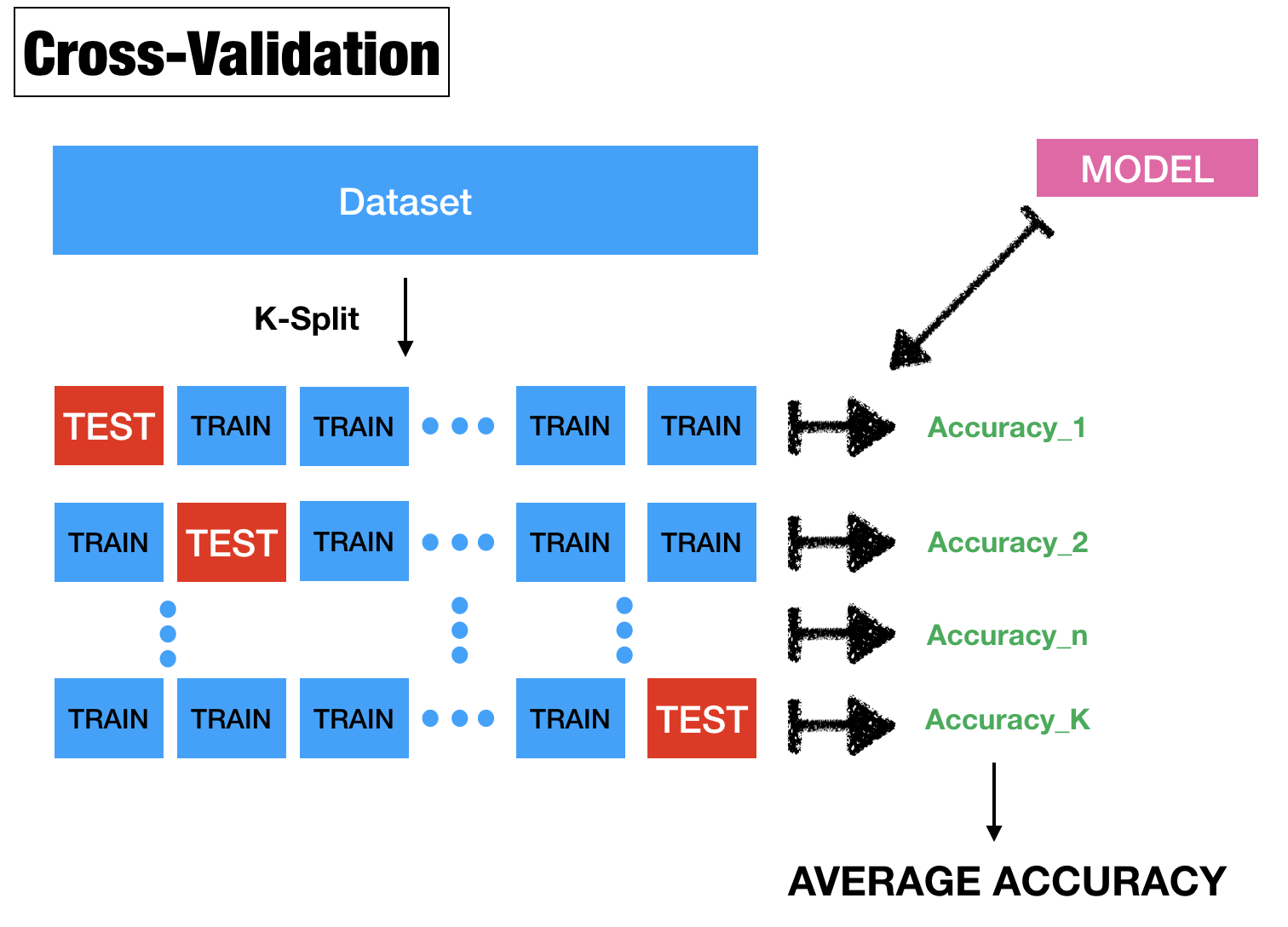
ですかね。これはデータ 個をK等分割(5か10が一般)してモデルの汎化性能を評価するためにあります。しかしここではパラメータのベストチョイスのために使います。これはとても重要な概念なので次の記事で深く確認しましょう。今回は簡単な図を最後に見てお別れです。
個をK等分割(5か10が一般)してモデルの汎化性能を評価するためにあります。しかしここではパラメータのベストチョイスのために使います。これはとても重要な概念なので次の記事で深く確認しましょう。今回は簡単な図を最後に見てお別れです。
でわ
READMORE