Science Blog
HRサイエンス研究所®︎
2022.06.03
推薦システムの交差検証について(1/2)グループワイズの交差検証
こんにちは! ミイダス株式会社のHRサイエンス研究所で、機械学習チームのリーダーをしている OBA です。 この記事では、機械学習による推薦システムの性能評価において交差検証(クロスバリ……
2019.02.12
PythonでRidgeを数式から実装する
[latexpage] こんにちは。 本日はRidge回帰の実装とパラメータの交差検証を行いましょう。 色々やっていると少し長くなりましたがお許しください。 https://gist.github……
2019.02.06
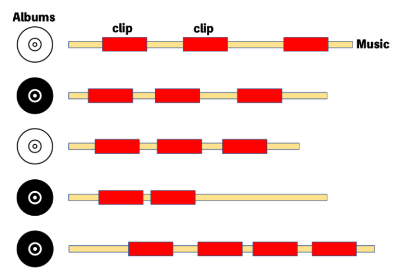
交差検証(Cross-Validation)をPythonでやる
[latexpage] こんにちは。 前回、交差検証というワードに触れ、その図を確認して終わりました。今回はその交差検証をしっかりと理解しましょう。 What is Cross-Validati……
2019.02.03
線形回帰とRidge回帰を数式からやる(理論編)
[latexpage] こんにちは。 正則化パート2ですね。前回の最後に Ridge Regression (Tikhonov regularization) Lasso Re……
2025.01.07
「学術越境による社会実装をめざした心理学研究」@京都大学に参加しました
その他
2024.08.05
【お知らせ】ペルソナのデータをテーマにトークします
2024.03.17
仕事での促進焦点と防止焦点
2023.05.26
技術書典14にHRサイエンスに関する書籍を出版してきました
2023.03.09
質問紙法によるデータ収集には仮説が大切である理由
HRサイエンス研究所の研究員、エンジニアによるサイエンスブログです。データの科学、人と組織の科学の2つを武器に挑戦を続けています。2つの科学に関する知見や技術情報などを発信しています。
TOP